BCS100 կարգաբերման նպատակն է ճշգրիտ որոշել տարողության և ջահի գլխիկի ու մետաղական թերթի միջև հեռավորության միջև եղած կապը։ապահովելով կայուն, արդյունավետ և ճշգրիտ կտրում
կատարողականություն
Մեքենայի յուրաքանչյուր մեկնարկից, թիթեղի փոխարինումից կամ ծայրակալի փոխարինումից հետո պետք է կատարվի նոր կարգաբերում։
Առաջին սերվո-կարգավորիչ (F1)
Սերվո-կարգավորումը օգտագործվում է շարժիչի շարժման բնութագրերը համապատասխանեցնելու համար, որը հիմք է հանդիսանում լողացող գլխիկի ճշգրիտ կարգավորման և ավտոմատ բարձրության հետևման համար։
Գործողության քայլեր՝
1. Տեղադրեք մետաղական թերթիկը հարթ դիրքով կտրող սեղանի վրա:
2. Օգտագործեք ծրագիրը կամ ձեռքի կառավարիչը՝ տեղաշարժելու համարմետաղական լազերային կտրող մեքենաԳլուխը տեղավորեք թերթիկի վերևում համապատասխան դիրքում։
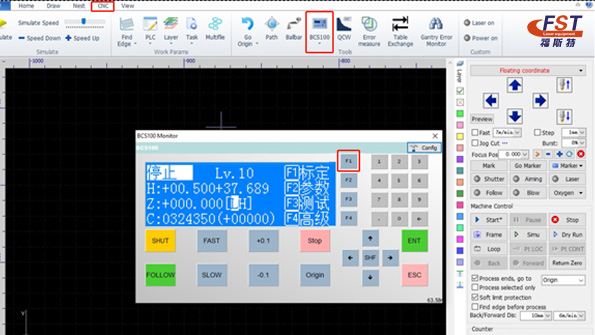
3. Բացեք CNC ինտերֆեյսը → սեղմեք BCS100 պատկերակը → ընտրեք F1 Calibration:
4. Սեղմեք 1 – Սերվոի կարգավորում։
Նշում.
Սերվո կարգաբերման ընթացքում շարժիչը կկատարի փոքր տատանողական շարժումներ։
Համոզվեք, որ Z-առանցքը տեղադրված է իր շարժման կենտրոնին մոտ՝ տատանումների ժամանակ գերշարժումը կանխելու համար։
5. Սեղմեք՝ կարգաբերումը սկսելու համար: Համակարգը ավտոմատ կերպով կավարտի գործընթացը:
6. Ավարտելուց հետո վերադարձեք նախորդ մենյուին։
Servo Zero շեղման մաքրում (ըստ ցանկության)
Եթե սերվո զրոյի շեղման արժեքը սխալ է թվում՝
Սեղմեք Մաքրել →, ապա սեղմեք հաստատելու համար → վերադառնալ նախորդ ընտրացանկին։
Երկրորդ լողացող գլխիկի տրամաչափում (F2)
Լողացող գլխիկի տրամաչափումը հաստատում է սենսորի բարձրության և տարողության արժեքների միջև փոխհարաբերությունը՝ ապահովելով բարձրության ճշգրիտ հետևում կտրման ընթացքում։
Գործողության քայլեր՝
1. Սեղմեք 2՝ լողացող գլխիկի տրամաչափման ինտերֆեյս մուտք գործելու համար:
2. Օգտագործեք ներքևի սլաքը՝ լազերի գլուխը թերթիկից 1-5 մմ բարձրության վրա իջեցնելու համար։
3. Համոզվեք, որ թերթիկը մնում է կայուն և զերծ է թրթռումներից։
4. Սեղմեք՝ տրամաչափումը սկսելու համար։
Ավտոմատացված կարգաբերման գործընթացը տևում է մոտավորապես 10-15 վայրկյան։
1. Լողացող գլուխը դանդաղորեն իջնում է, մինչև որ հայտնաբերի թերթի մակերեսը։
2. Թիթեղին դիպչելուց հետո այն մի փոքր բարձրանում է՝ սենսորի կայունությունը գնահատելու համար։
3. Այնուհետև այն շարունակում է շարժվել վերև նախապես որոշված հեռավորությամբ՝ սենսորի հարթությունը և բնութագրական կորերը գնահատելու համար։
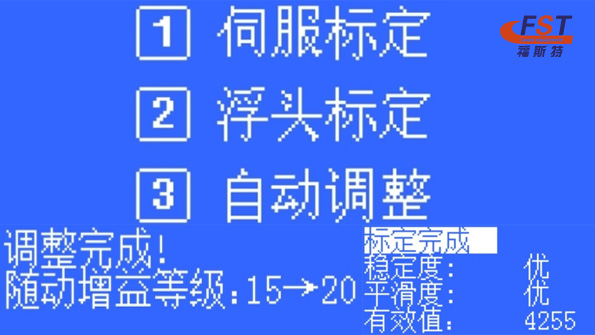
4. Սեղմեք պահպանելու համար։ Այնուհետև կցուցադրվի բարձրություն-տարողություն կորը։
Պարամետրի նկարագրությունը՝
Կայունություն։Արտացոլում է կոնդենսատորային ազդանշանի ստատիկ կատարողականը: Վատ կայունությունը կարող է վկայել թիթեղի տատանման կամ արտաքին միջամտության մասին:
Հարթություն:Ցույց է տալիս տարողության փոփոխության դինամիկ կատարողականը տրամաչափման ընթացքում։
Երկու պարամետրերն էլ պետք է հասնեն առնվազն «Միջին» մակարդակի, մինչդեռ իդեալական է «Լավ» կամ «Գերազանց»։
Արդյունավետ արժեք՝Ներկայացնում է տարողության փոփոխության միջակայքը թերթիկից 0.5 մմ վերևից մինչև հեռավոր դիրք։
Ավելի բարձր արժեքները ցույց են տալիս ավելի լայն զգայունության միջակայք, ինչը հանգեցնում է ավելի լավ հետևման ճշգրտության և կայունության։
Երրորդ ավտոմատ կարգավորում (F3)
Ավտոմատ կարգավորումը նուրբ կարգավորում է ներքին պարամետրերը՝ իրական կտրման ընթացքում բարձրության ավելի հարթ և ավելի արձագանքող հետևողականություն ապահովելու համար:
Ավտոմատ կարգավորմանը մուտք գործելուց առաջ համոզվեք հետևյալի հետ՝
Սերվոի կարգաբերումն ավարտված է
Մեքենան տեղադրվել է տնային ռեժիմում, և Z-առանցքի մեխանիկական կոորդինատները ճիշտ են։
Լողացող գլխիկի կարգաբերումն ավարտվել է և գործում է ճիշտ
Հետևելու համար անմիջապես լողացող գլխիկի տակ տեղադրվում է թերթիկ
Գործողություն՝
Մուտք գործեք ավտոմատ կարգավորման ինտերֆեյս → համակարգը ավտոմատ կերպով կկարգավորի բարձրությանը հետևող պարամետրերը → պահպանել և դուրս գալ ավարտից հետո։
Կալիբրացիան ավարտված է։լազերային կտրիչԱվելի ճշգրիտ, սահուն և արդյունավետ։
Ավարտելով բոլոր երեք կարգաբերման փուլերը՝ սերվո կարգաբերում → լողացող գլխիկի կարգաբերում → ավտոմատ կարգավորում՝ BCS100-ը հասնում է բարձրության զգայունացման և հետևման օպտիմալ աշխատանքի՝ ապահովելով կտրման հուսալի որակ։
ամեն անգամ
Հրապարակման ժամանակը. Նոյեմբերի 14, 2025

